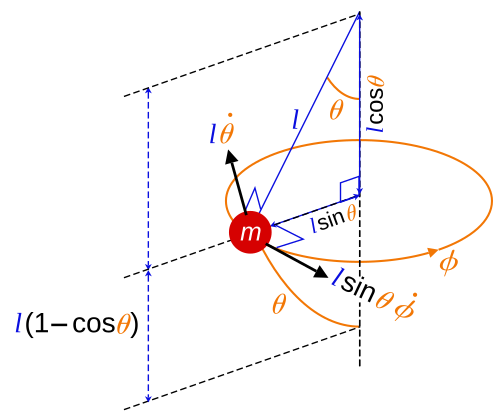
Spherical pendulum: angles and velocities. source ↗ In physics , a spherical pendulum is a higher dimensional analogue of the pendulum . It consists of a mass m moving without friction on the surface of a sphere . The only forces acting on the mass are the reaction from the sphere and gravity .
It is convenient to use the spherical coordinates to describe the position of the mass in terms of
(
r
,
θ
,
ϕ
)
{\displaystyle (r,\theta ,\phi )}
r is fixed such that
r
=
l
{\displaystyle r=l}
Lagrangian mechanics
Routinely, in order to write down the kinetic
T
=
1
2
m
v
2
{\displaystyle T={\tfrac {1}{2}}mv^{2}}
V
{\displaystyle V}
L
=
T
−
V
{\displaystyle L=T-V}
generalized coordinates the position of the mass is expressed along Cartesian axes. Here, following the conventions shown in the diagram,
x
=
l
sin
θ
cos
ϕ
{\displaystyle x=l\sin \theta \cos \phi }
y
=
l
sin
θ
sin
ϕ
{\displaystyle y=l\sin \theta \sin \phi }
z
=
l
(
1
−
cos
θ
)
{\displaystyle z=l(1-\cos \theta )}
Next, time derivatives of these coordinates are taken, to obtain velocities along the axes
x
˙
=
l
cos
θ
cos
ϕ
θ
˙
−
l
sin
θ
sin
ϕ
ϕ
˙
{\displaystyle {\dot {x}}=l\cos \theta \cos \phi \,{\dot {\theta }}-l\sin \theta \sin \phi \,{\dot {\phi }}}
y
˙
=
l
cos
θ
sin
ϕ
θ
˙
+
l
sin
θ
cos
ϕ
ϕ
˙
{\displaystyle {\dot {y}}=l\cos \theta \sin \phi \,{\dot {\theta }}+l\sin \theta \cos \phi \,{\dot {\phi }}}
z
˙
=
l
sin
θ
θ
˙
{\displaystyle {\dot {z}}=l\sin \theta \,{\dot {\theta }}}
Thus,
v
2
=
x
˙
2
+
y
˙
2
+
z
˙
2
=
l
2
(
θ
˙
2
+
sin
2
θ
ϕ
˙
2
)
{\displaystyle v^{2}={\dot {x}}^{2}+{\dot {y}}^{2}+{\dot {z}}^{2}=l^{2}\left({\dot {\theta }}^{2}+\sin ^{2}\theta \,{\dot {\phi }}^{2}\right)}
and
T
=
1
2
m
v
2
=
1
2
m
l
2
(
θ
˙
2
+
sin
2
θ
ϕ
˙
2
)
{\displaystyle T={\tfrac {1}{2}}mv^{2}={\tfrac {1}{2}}ml^{2}\left({\dot {\theta }}^{2}+\sin ^{2}\theta \,{\dot {\phi }}^{2}\right)}
V
=
m
g
z
=
m
g
l
(
1
−
cos
θ
)
{\displaystyle V=mg\,z=mg\,l(1-\cos \theta )}
The Lagrangian, with constant parts removed, is1
L
=
1
2
m
l
2
(
θ
˙
2
+
sin
2
θ
ϕ
˙
2
)
+
m
g
l
cos
θ
.
{\displaystyle L={\frac {1}{2}}ml^{2}\left({\dot {\theta }}^{2}+\sin ^{2}\theta \ {\dot {\phi }}^{2}\right)+mgl\cos \theta .}
The Euler–Lagrange equation involving the polar angle
θ
{\displaystyle \theta }
d
d
t
∂
∂
θ
˙
L
−
∂
∂
θ
L
=
0
{\displaystyle {\frac {d}{dt}}{\frac {\partial }{\partial {\dot {\theta }}}}L-{\frac {\partial }{\partial \theta }}L=0}
gives
d
d
t
(
m
l
2
θ
˙
)
−
m
l
2
sin
θ
⋅
cos
θ
ϕ
˙
2
+
m
g
l
sin
θ
=
0
{\displaystyle {\frac {d}{dt}}\left(ml^{2}{\dot {\theta }}\right)-ml^{2}\sin \theta \cdot \cos \theta \,{\dot {\phi }}^{2}+mgl\sin \theta =0}
and
θ
¨
=
sin
θ
cos
θ
ϕ
˙
2
−
g
l
sin
θ
{\displaystyle {\ddot {\theta }}=\sin \theta \cos \theta {\dot {\phi }}^{2}-{\frac {g}{l}}\sin \theta }
When
ϕ
˙
=
0
{\displaystyle {\dot {\phi }}=0}
differential equation for the motion of a simple gravity pendulum .
Similarly, the Euler–Lagrange equation involving the azimuth
ϕ
{\displaystyle \phi }
d
d
t
∂
∂
ϕ
˙
L
−
∂
∂
ϕ
L
=
0
{\displaystyle {\frac {d}{dt}}{\frac {\partial }{\partial {\dot {\phi }}}}L-{\frac {\partial }{\partial \phi }}L=0}
gives
d
d
t
(
m
l
2
sin
2
θ
⋅
ϕ
˙
)
=
0
{\displaystyle {\frac {d}{dt}}\left(ml^{2}\sin ^{2}\theta \cdot {\dot {\phi }}\right)=0}
The last equation shows that angular momentum around the vertical axis,
|
L
z
|
=
l
sin
θ
×
m
l
sin
θ
ϕ
˙
{\displaystyle |\mathbf {L} _{z}|=l\sin \theta \times ml\sin \theta \,{\dot {\phi }}}
m
l
2
sin
2
θ
{\displaystyle ml^{2}\sin ^{2}\theta }
The second order differential equation determining the evolution of
ϕ
{\displaystyle \phi }
ϕ
¨
sin
θ
=
−
2
θ
˙
ϕ
˙
cos
θ
{\displaystyle {\ddot {\phi }}\,\sin \theta =-2\,{\dot {\theta }}\,{\dot {\phi }}\,\cos \theta }
The azimuth
ϕ
{\displaystyle \phi }
cyclic coordinate , which implies that its conjugate momentum is a constant of motion .
The conical pendulum refers to the special solutions where
θ
˙
=
0
{\displaystyle {\dot {\theta }}=0}
ϕ
˙
{\displaystyle {\dot {\phi }}}
Hamiltonian mechanics
The Hamiltonian is
H
=
P
θ
θ
˙
+
P
ϕ
ϕ
˙
−
L
{\displaystyle H=P_{\theta }{\dot {\theta }}+P_{\phi }{\dot {\phi }}-L}
where conjugate momenta are
P
θ
=
∂
L
∂
θ
˙
=
m
l
2
⋅
θ
˙
{\displaystyle P_{\theta }={\frac {\partial L}{\partial {\dot {\theta }}}}=ml^{2}\cdot {\dot {\theta }}}
and
P
ϕ
=
∂
L
∂
ϕ
˙
=
m
l
2
sin
2
θ
⋅
ϕ
˙
{\displaystyle P_{\phi }={\frac {\partial L}{\partial {\dot {\phi }}}}=ml^{2}\sin ^{2}\!\theta \cdot {\dot {\phi }}}
In terms of coordinates and momenta it reads
H
=
[
1
2
m
l
2
θ
˙
2
+
1
2
m
l
2
sin
2
θ
ϕ
˙
2
]
⏟
T
+
[
−
m
g
l
cos
θ
]
⏟
V
=
P
θ
2
2
m
l
2
+
P
ϕ
2
2
m
l
2
sin
2
θ
−
m
g
l
cos
θ
{\displaystyle H=\underbrace {\left[{\frac {1}{2}}ml^{2}{\dot {\theta }}^{2}+{\frac {1}{2}}ml^{2}\sin ^{2}\theta {\dot {\phi }}^{2}\right]} _{T}+\underbrace {{\bigg [}-mgl\cos \theta {\bigg ]}} _{V}={P_{\theta }^{2} \over 2ml^{2}}+{P_{\phi }^{2} \over 2ml^{2}\sin ^{2}\theta }-mgl\cos \theta }
Hamilton's equations will give time evolution of coordinates and momenta in four first-order differential equations
θ
˙
=
P
θ
m
l
2
{\displaystyle {\dot {\theta }}={P_{\theta } \over ml^{2}}}
ϕ
˙
=
P
ϕ
m
l
2
sin
2
θ
{\displaystyle {\dot {\phi }}={P_{\phi } \over ml^{2}\sin ^{2}\theta }}
P
θ
˙
=
P
ϕ
2
m
l
2
sin
3
θ
cos
θ
−
m
g
l
sin
θ
{\displaystyle {\dot {P_{\theta }}}={P_{\phi }^{2} \over ml^{2}\sin ^{3}\theta }\cos \theta -mgl\sin \theta }
P
ϕ
˙
=
0
{\displaystyle {\dot {P_{\phi }}}=0}
Momentum
P
ϕ
{\displaystyle P_{\phi }}
rotational symmetry of the system around the vertical axis.
Trajectory
Trajectory of a spherical pendulum. source ↗ Trajectory of the mass on the sphere can be obtained from the expression for the total energy
E
=
[
1
2
m
l
2
θ
˙
2
+
1
2
m
l
2
sin
2
θ
ϕ
˙
2
]
⏟
T
+
[
−
m
g
l
cos
θ
]
⏟
V
{\displaystyle E=\underbrace {\left[{\frac {1}{2}}ml^{2}{\dot {\theta }}^{2}+{\frac {1}{2}}ml^{2}\sin ^{2}\theta {\dot {\phi }}^{2}\right]} _{T}+\underbrace {{\bigg [}-mgl\cos \theta {\bigg ]}} _{V}}
by noting that the vertical component of angular momentum
L
z
=
m
l
2
sin
2
θ
ϕ
˙
{\displaystyle L_{z}=ml^{2}\sin ^{2}\!\theta \,{\dot {\phi }}}
1
Hence
E
=
1
2
m
l
2
θ
˙
2
+
1
2
L
z
2
m
l
2
sin
2
θ
−
m
g
l
cos
θ
{\displaystyle E={\frac {1}{2}}ml^{2}{\dot {\theta }}^{2}+{\frac {1}{2}}{\frac {L_{z}^{2}}{ml^{2}\sin ^{2}\theta }}-mgl\cos \theta }
(
d
θ
d
t
)
2
=
2
m
l
2
[
E
−
1
2
L
z
2
m
l
2
sin
2
θ
+
m
g
l
cos
θ
]
{\displaystyle \left({\frac {d\theta }{dt}}\right)^{2}={\frac {2}{ml^{2}}}\left[E-{\frac {1}{2}}{\frac {L_{z}^{2}}{ml^{2}\sin ^{2}\theta }}+mgl\cos \theta \right]}
which leads to an elliptic integral of the first kind1
θ
{\displaystyle \theta }
t
(
θ
)
=
1
2
m
l
2
∫
[
E
−
1
2
L
z
2
m
l
2
sin
2
θ
+
m
g
l
cos
θ
]
−
1
2
d
θ
{\displaystyle t(\theta )={\sqrt {{\tfrac {1}{2}}ml^{2}}}\int \left[E-{\frac {1}{2}}{\frac {L_{z}^{2}}{ml^{2}\sin ^{2}\theta }}+mgl\cos \theta \right]^{-{\frac {1}{2}}}\,d\theta }
and an elliptic integral of the third kind for
ϕ
{\displaystyle \phi }
ϕ
(
θ
)
=
L
z
l
2
m
∫
sin
−
2
θ
[
E
−
1
2
L
z
2
m
l
2
sin
2
θ
+
m
g
l
cos
θ
]
−
1
2
d
θ
{\displaystyle \phi (\theta )={\frac {L_{z}}{l{\sqrt {2m}}}}\int \sin ^{-2}\theta \left[E-{\frac {1}{2}}{\frac {L_{z}^{2}}{ml^{2}\sin ^{2}\theta }}+mgl\cos \theta \right]^{-{\frac {1}{2}}}\,d\theta }
The angle
θ
{\displaystyle \theta }
1
E
>
1
2
L
z
2
m
l
2
sin
2
θ
−
m
g
l
cos
θ
{\displaystyle E>{\frac {1}{2}}{\frac {L_{z}^{2}}{ml^{2}\sin ^{2}\theta }}-mgl\cos \theta }
See also
See also
References
References
Landau, Lev Davidovich; Evgenii Mikhailovich Lifshitz (1976). Course of Theoretical Physics: Volume 1 Mechanics . Butterworth-Heinenann. pp. 33– 34. ISBN 0750628960
Further reading
Further reading
Weinstein, Alexander (1942). "The spherical pendulum and complex integration". The American Mathematical Monthly . 49 (8): 521– 523. doi :10.1080/00029890.1942.11991275 . Kohn, Walter (1946). "Contour integration in the theory of the spherical pendulum and the heavy symmetrical top" . Transactions of the American Mathematical Society . 59 (1): 107– 131. doi :10.2307/1990314 JSTOR 1990314 . Olsson, M. G. (1981). "Spherical pendulum revisited". American Journal of Physics . 49 (6): 531– 534. Bibcode :1981AmJPh..49..531O . doi :10.1119/1.12666 . Horozov, Emil (1993). "On the isoenergetical non-degeneracy of the spherical pendulum". Physics Letters A . 173 (3): 279– 283. Bibcode :1993PhLA..173..279H . doi :10.1016/0375-9601(93)90279-9 . Richter, Peter H.; Dullin, Holger R.; Waalkens, Holger; Wiersig, Jan (1996). "Spherical pendulum, actions and spin" J. Phys. Chem . 100 (49): 19124– 19135. doi :10.1021/jp9617128 . S2CID 18023607 . Shiriaev, A. S.; Ludvigsen, H.; Egeland, O. (2004). "Swinging up the spherical pendulum via stabilization of its first integrals". Automatica . 40 : 73– 85. doi :10.1016/j.automatica.2003.07.009 . Essen, Hanno; Apazidis, Nicholas (2009). "Turning points of the spherical pendulum and the golden ratio". European Journal of Physics . 30 (2): 427– 432. Bibcode :2009EJPh...30..427E . doi :10.1088/0143-0807/30/2/021 . S2CID 121216295 . Dullin, Holger R. (2013). "Semi-global symplectic invariants of the spherical pendulum" . Journal of Differential Equations . 254 (7): 2942– 2963. arXiv :1108.4962 Bibcode :2013JDE...254.2942D . doi :10.1016/j.jde.2013.01.018