



In mathematics, a quasiconvex function is a real-valued function defined on a convex subset of a real vector space, such that for any real number y, the set of points on which the function value is at most y is a convex set. In other words, the inverse image of any set of the form is a convex set. An equivalent definition is: along any interval in the function domain, the function attains the highest value on one of the endpoints.
Quasiconvexity is a more general property than convexity: all convex functions are also quasiconvex, but not all quasiconvex functions are convex.
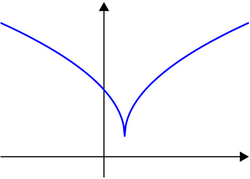
For one-dimensional functions (functions on R), to check graphically whether a function is quasiconvex, move a horizontal line from minus infinity upwards, and verify that, whenever the line intersects the region above the function graph, the intersection is an interval.
A quasiconcave function is the negative of a quasiconvex function. In a quasiconcave function, for any real number y, the set of points on which the function value is at least y is convex. Equivalently, along any interval in the function domain, the function attains the lowest value on one of the endpoints. In one dimension, verify that, for any horizontal line that intersects the region below the function graph, the intersection is an interval.
Univariate unimodal functions are quasiconvex or quasiconcave, however this is not necessarily the case for functions with multiple arguments. For example, the 2-dimensional Rosenbrock function is unimodal but not quasiconvex and functions with star-convex sublevel sets can be unimodal without being quasiconvex.
Definition and properties
A function defined on a convex subset of a real vector space is quasiconvex if for all and we have
In words, the objective is quasiconvex if and only if the maximum of along a straight line between any two end points is never greater than the value at the higher endpoint. Note that the points and may be points in n-dimensional space. If the inequality is strict, i.e.
for all and , then is strictly quasiconvex. That is, strict quasiconvexity requires that a point directly between two other points must give a lower value of the function than one of the other points does.


An alternative way (see introduction) of defining a quasi-convex function is to require that each sublevel set is a convex set. It follows that for every strictly quasiconvex function, there exist a strictly monotone increasing coordinate transformation such that is strictly convex.
A quasiconcave function is a function whose negative is quasiconvex, and a strictly quasiconcave function is a function whose negative is strictly quasiconvex. Equivalently a function is quasiconcave if and only if
A (strictly) quasiconvex function has (strictly) convex lower contour sets, while a (strictly) quasiconcave function has (strictly) convex upper contour sets. Unimodal probability distributions like the Gaussian distribution are common examples of quasi-concave functions that are not concave.
A function that is both quasiconvex and quasiconcave is quasilinear, and satisfies
For a quasilinear function defined on a plane, the level sets are always lines. More generally, the level sets of a quasilinear function over are -dimensional planes.
Applications
Quasiconvex functions have applications in mathematical analysis, in mathematical optimization, and in game theory and economics.
Mathematical optimization
In nonlinear optimization, quasiconvex programming studies iterative methods that converge to a minimum (if one exists) for quasiconvex functions. Quasiconvex programming is a generalization of convex programming.1 Quasiconvex programming is used in the solution of "surrogate" dual problems, whose biduals provide quasiconvex closures of the primal problem, which therefore provide tighter bounds than do the convex closures provided by Lagrangian dual problems.2 In theory, quasiconvex programming and convex programming problems can be solved in reasonable amount of time, where the number of iterations grows like a polynomial in the dimension of the problem (and in the reciprocal of the approximation error tolerated);3 however, such theoretically "efficient" methods use "divergent-series" step size rules, which were first developed for classical subgradient methods. Classical subgradient methods using divergent-series rules are much slower than modern methods of convex minimization, such as subgradient projection methods, bundle methods of descent, and nonsmooth filter methods.
Economics and partial differential equations: Minimax theorems
In microeconomics, quasiconcave utility functions imply that consumers have convex preferences. Quasiconvex functions are important also in game theory, industrial organization, and general equilibrium theory, particularly for applications of Sion's minimax theorem. Generalizing a minimax theorem of John von Neumann, Sion's theorem is also used in the theory of partial differential equations.
Preservation of quasiconvexity
Operations preserving quasiconvexity
- maximum of quasiconvex functions (i.e. ) is quasiconvex. Similarly, maximum of strict quasiconvex functions is strict quasiconvex.4 Similarly, the minimum of quasiconcave functions is quasiconcave, and the minimum of strictly-quasiconcave functions is strictly-quasiconcave.
- composition with a non-decreasing function : quasiconvex, non-decreasing, then is quasiconvex. Similarly, if quasiconcave, non-decreasing, then is quasiconcave.
- minimization (i.e. quasiconvex, convex set, then is quasiconvex)
Operations not preserving quasiconvexity
- The sum of quasiconvex functions defined on the same domain need not be quasiconvex: In other words, if are quasiconvex, then need not be quasiconvex. For example, are quasiconvex (in fact, quasilinear) functions whose sum is not quasiconvex.
- The sum of quasiconvex functions defined on different domains (i.e. if are quasiconvex, ) need not be quasiconvex. Such functions are called "additively decomposed" in economics and "separable" in mathematical optimization. For example, defined for positive is quasiconvex, but is not quasiconvex on the positive orthant.
Examples
- Every convex function is quasiconvex.
- A concave function can be quasiconvex. For example, is both concave and quasiconvex.
- Any monotonic function is both quasiconvex and quasiconcave. More generally, a function which decreases up to a point and increases from that point on is quasiconvex (compare unimodality).
- The floor function is an example of a quasiconvex function that is neither convex nor continuous.
See also
See also
- Convex function
- Concave function
- Logarithmically concave function
- Pseudoconvexity in the sense of several complex variables (not generalized convexity)
- Pseudoconvex function
- Invex function
- Concavification
References
References
- Di Guglielmo (1977, pp. 287–288): Di Guglielmo, F. (1977). "Nonconvex duality in multiobjective optimization". Mathematics of Operations Research. 2 (3): 285–291. doi:10.1287/moor.2.3.285. JSTOR 3689518. MR 0484418.
- Di Guglielmo, F. (1981). "Estimates of the duality gap for discrete and quasiconvex optimization problems". In Schaible, Siegfried; Ziemba, William T. (eds.). Generalized concavity in optimization and economics: Proceedings of the NATO Advanced Study Institute held at the University of British Columbia, Vancouver, B.C., August 4–15, 1980. New York: Academic Press, Inc. [Harcourt Brace Jovanovich, Publishers]. pp. 281–298. ISBN 0-12-621120-5. MR 0652702.
- Kiwiel, Krzysztof C. (2001). "Convergence and efficiency of subgradient methods for quasiconvex minimization". Mathematical Programming, Series A. 90 (1). Berlin, Heidelberg: Springer: 1–25. doi:10.1007/PL00011414. ISSN 0025-5610. MR 1819784. S2CID 10043417. Kiwiel acknowledges that Yuri Nesterov first established that quasiconvex minimization problems can be solved efficiently.
- Johansson, Edvard; Petersson, David (2016). Parameter Optimization for Equilibrium Solutions of Mass Action Systems (MSc thesis). pp. 13–14. Retrieved 26 October 2016.
- Avriel, M., Diewert, W.E., Schaible, S. and Zang, I., Generalized Concavity, Plenum Press, 1988.
- Crouzeix, J.-P. (2008). "Quasi-concavity". In Durlauf, Steven N.; Blume, Lawrence E (eds.). The New Palgrave Dictionary of Economics (Second ed.). Palgrave Macmillan. pp. 815–816. doi:10.1057/9780230226203.1375. ISBN 978-0-333-78676-5.
- Singer, Ivan Abstract convex analysis. Canadian Mathematical Society Series of Monographs and Advanced Texts. A Wiley-Interscience Publication. John Wiley & Sons, Inc., New York, 1997. xxii+491 pp. ISBN 0-471-16015-6
External links
External links
- Sion, Maurice (1958). "On general minimax theorems". Pacific Journal of Mathematics. 8 (1): 171–176.
- Mathematical programming glossary Archived 2006-07-15 at the Wayback Machine
- Quasiconcavity and quasiconvexity - by Martin J. Osborne, University of Toronto Department of Economics